stage3 <<
Previous Next >> stage3後記
stage3工作內容
本次作業目標為讓四腳獸站立並用鍵盤控制。
此專案分為多個版本 如下
第一版(原版)
此版沿用上次專案之模型場景,並試著將設定更改嘗試讓它直線行走。
多方嘗試後發現,四足在站立上極限,行走上支撐度不足,故研究多足排列組合嘗試。
3D圖▼
coppliasim組合圖▼
第一版模擬影片▼
第二版(六足排列)
此版改為六足橫向排列,以增加腳觸地時的支撐點。
此版前後依舊維持兩連動腳,前後容易造成翻滾,故改變其排列組合。
3D圖▼
coppliasim組合圖▼
第二版模擬影片▼
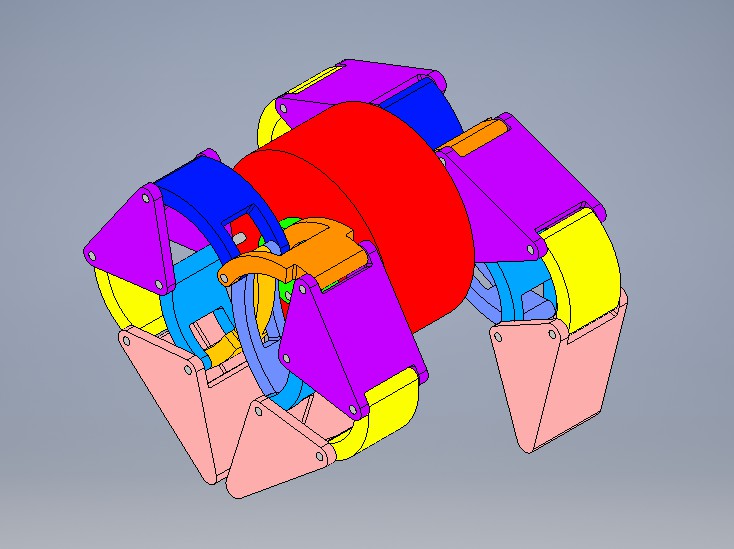
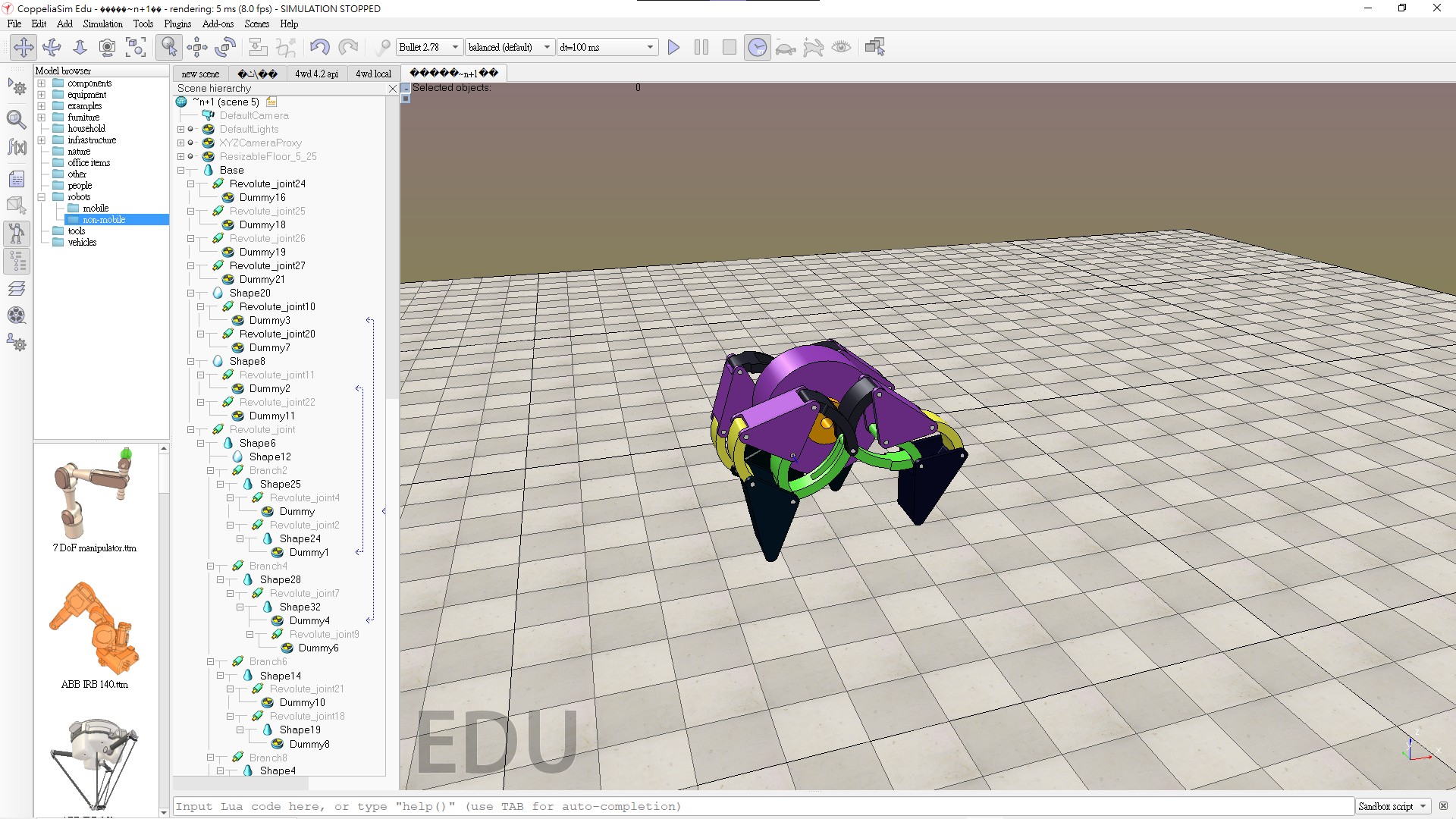
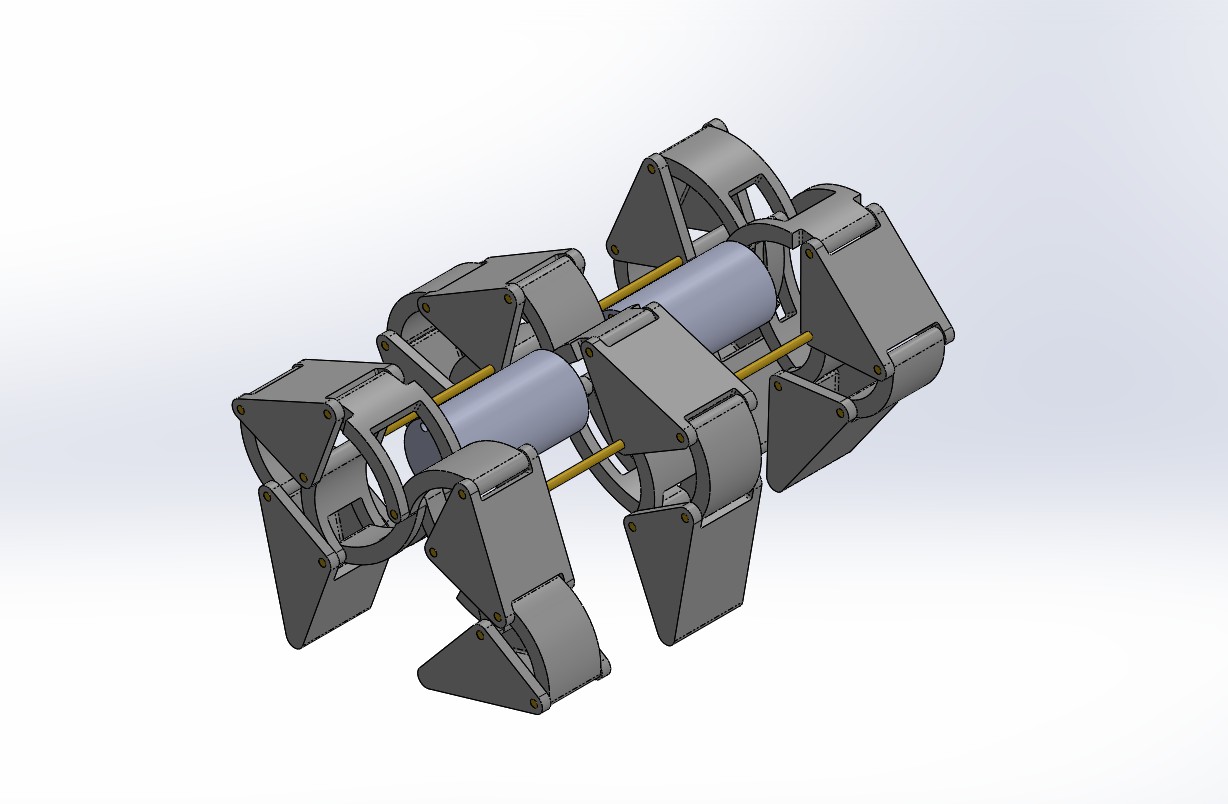
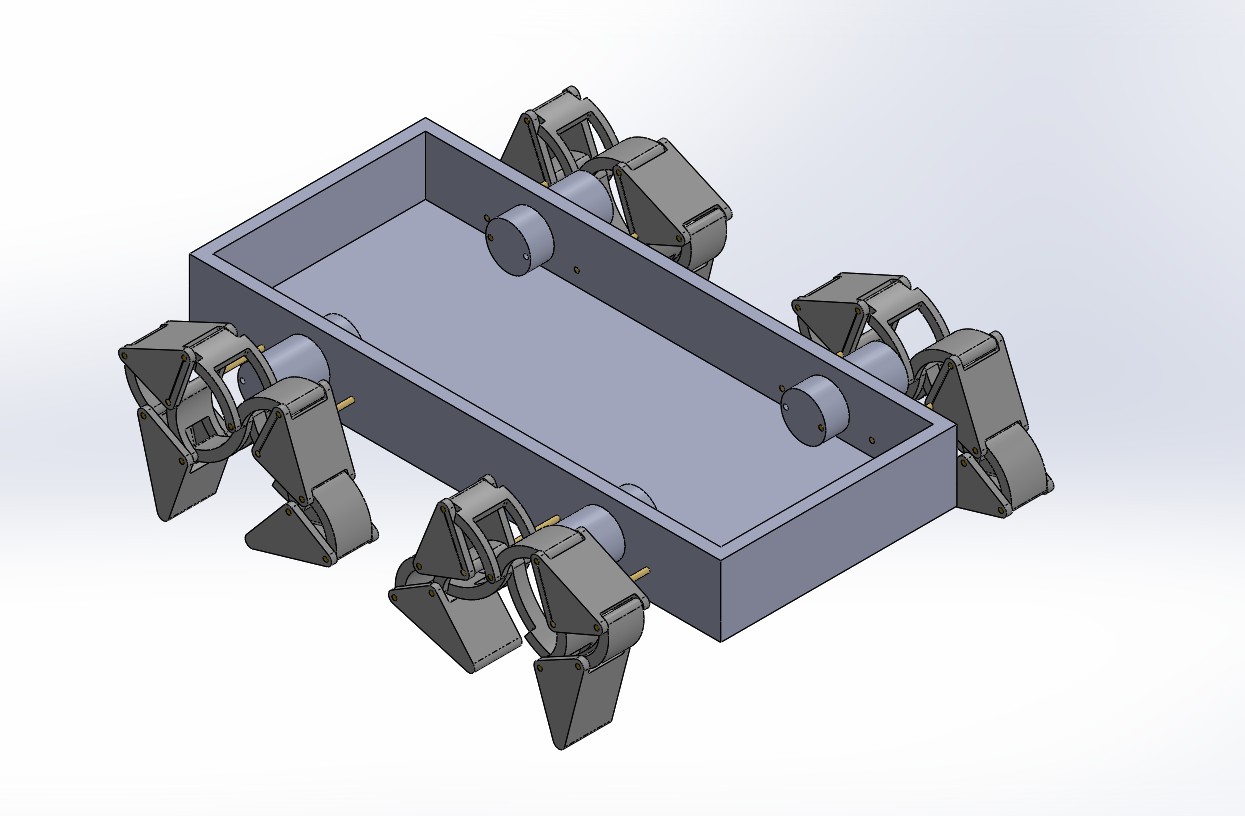
第三版(前後四足八腳)
此版改為前後八腳板,此版利用兩連動腳組成一組,排列成四方四足。
此版模擬時發現關節連接處並未依照預期情況支撐住,故思考是否為零件立體化設計問題。
3D圖▼
coppliasim組合圖▼
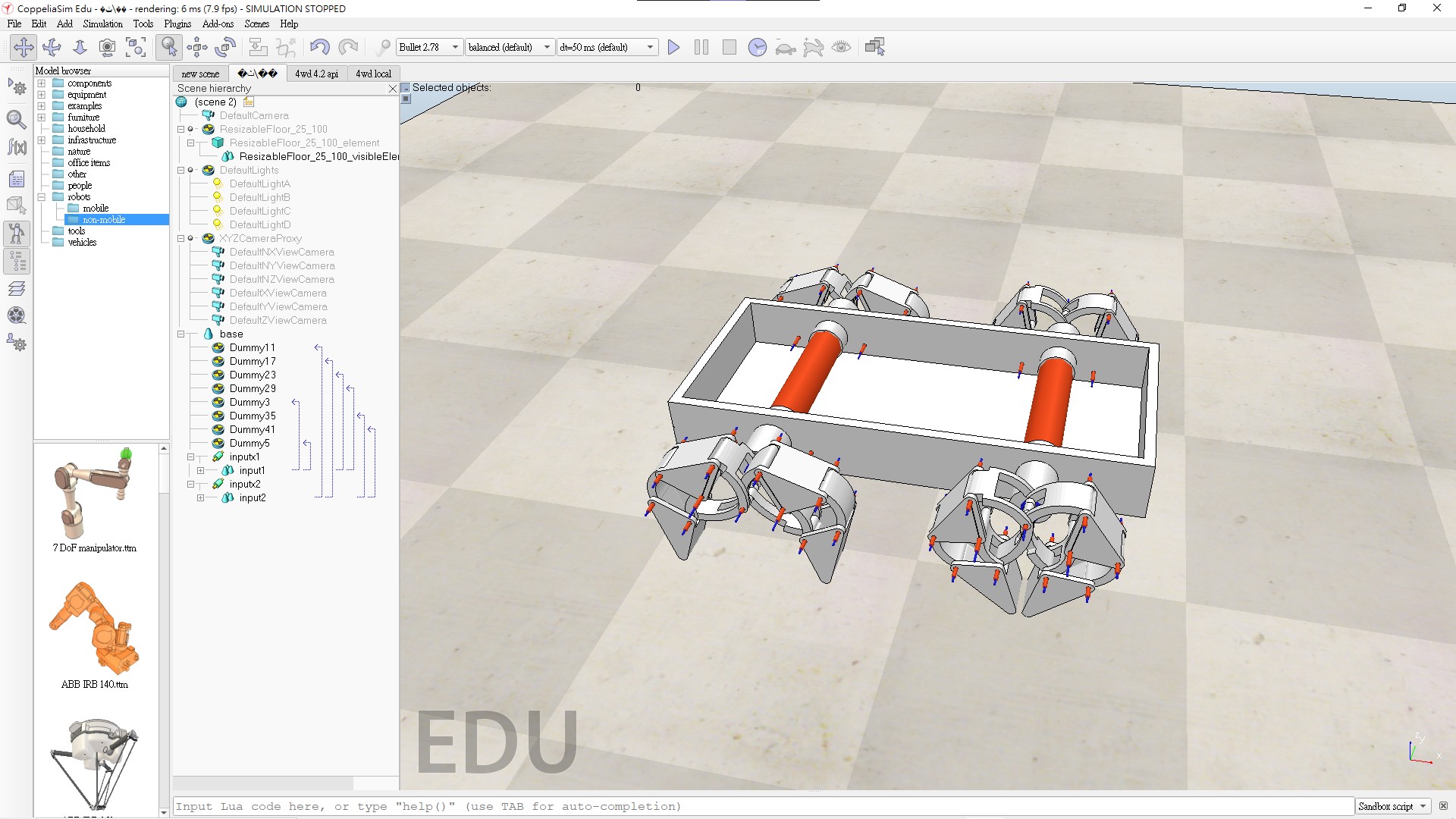
第三版模擬影片▼
老師範例模擬影片▼
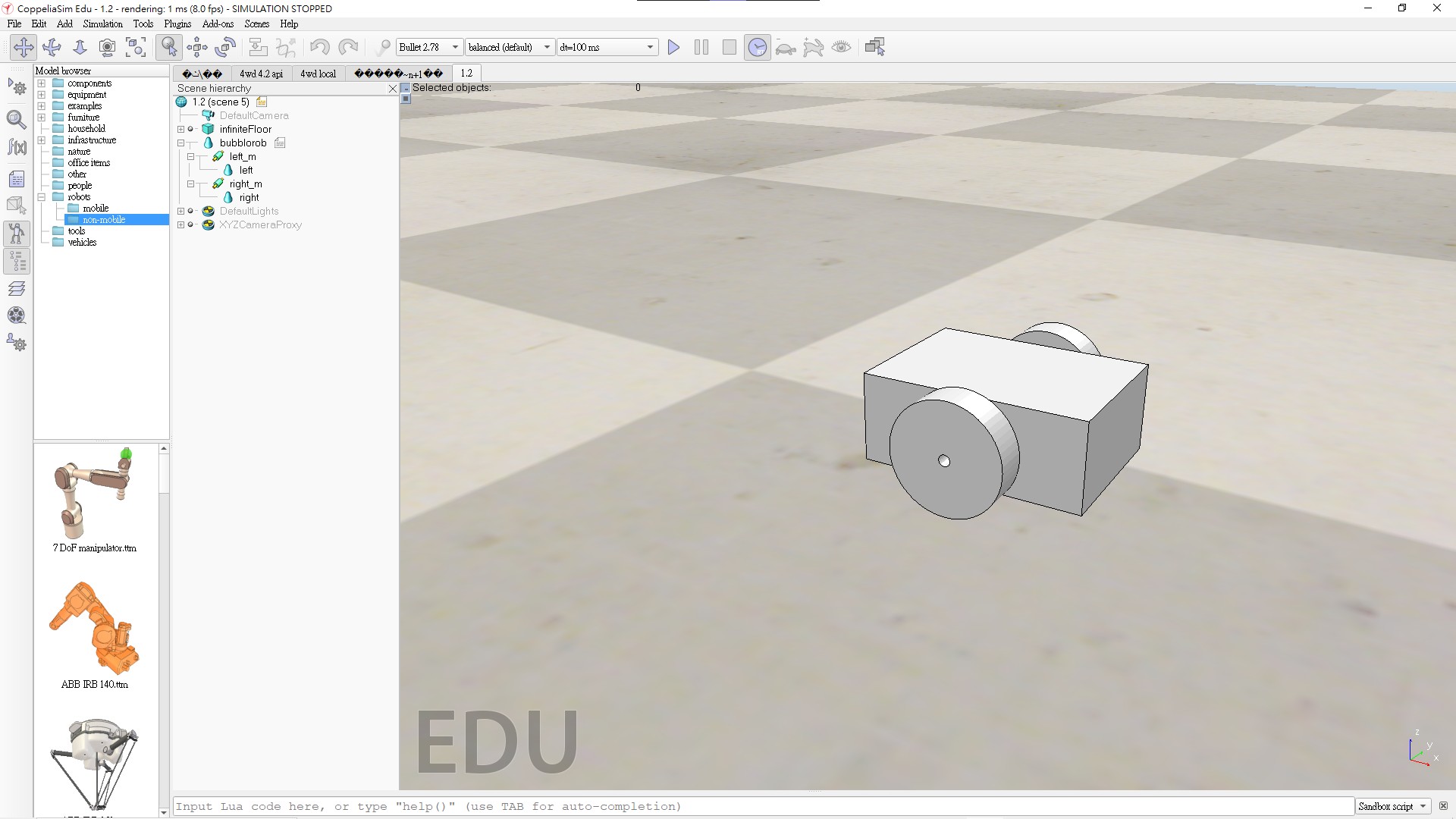
鍵盤控制研究
為達到鍵盤控制目的,故開始研究鍵盤控制程式。
下列使用簡易機構研究。
簡易圖▼
程式碼▼
function sysCall_init()
left_front_handle= sim.getObjectHandle('left_m')
left_back_handle= sim.getObjectHandle('left_m')
right_back_handle= sim.getObjectHandle('right_m')
right_front_handle= sim.getObjectHandle('right_m')
MaxVel=20
leftvelocity=0
rightvelocity=0
dVel=5;
--sim.setJointTargetVelocity(left_front_handle,leftvelocity)
sim.setJointTargetVelocity(left_back_handle,leftvelocity)
sim.setJointTargetVelocity(right_back_handle,rightvelocity)
--sim.setJointTargetVelocity(right_front_handle,rightvelocity)
end
function sysCall_actuation()
message,auxiliaryData=sim.getSimulatorMessage()
while message~=-1 do
if (message==sim.message_keypress) then
if (auxiliaryData[1]==32) then
-- right key
leftvelocity=0
rightvelocity=0
sim.setJointForce(left_front_handle, 0)
sim.setJointForce(left_back_handle, 0)
sim.setJointForce(right_back_handle, 0)
sim.setJointForce(right_front_handle, 0)
break
else
--sim.setJointForce(left_front_handle, 10000)
sim.setJointForce(left_back_handle, 10000)
sim.setJointForce(right_back_handle, 10000)
--sim.setJointForce(right_front_handle, 10000)
end
if (auxiliaryData[1]==2008) then
-- up key
leftvelocity=(leftvelocity+rightvelocity)/2
rightvelocity=leftvelocity
leftvelocity=leftvelocity+dVel
rightvelocity=rightvelocity+dVel
end
if (auxiliaryData[1]==2007) then
-- down key
leftvelocity=(leftvelocity+rightvelocity)/2
rightvelocity=leftvelocity
leftvelocity=leftvelocity-dVel
rightvelocity=rightvelocity-dVel
end
if (auxiliaryData[1]==2009) then
-- left key
leftvelocity=leftvelocity-dVel
rightvelocity=rightvelocity+dVel
end
if (auxiliaryData[1]==2010) then
-- right key
leftvelocity=leftvelocity+dVel
rightvelocity=rightvelocity-dVel
end
end
message,auxiliaryData=sim.getSimulatorMessage()
end
if leftvelocity>MaxVel then
leftvelocity=MaxVel
end
if leftvelocity<-MaxVel then
leftvelocity=-MaxVel
end
if rightvelocity>MaxVel then
rightvelocity=MaxVel
end
if rightvelocity<-MaxVel then
rightvelocity=-MaxVel
end
--sim.setJointTargetVelocity(left_front_handle,leftvelocity)
sim.setJointTargetVelocity(left_back_handle,leftvelocity)
sim.setJointTargetVelocity(right_back_handle,rightvelocity)
--sim.setJointTargetVelocity(right_front_handle,rightvelocity)
end
鍵盤控制模擬影片▼
成果影片▼
stage3 <<
Previous Next >> stage3後記