stage2 <<
Previous Next >> stage2後記
stage2工作內容
負責連桿設計討論 行走模擬
連桿設計討論
此次連桿設計引用Jansen's linkage
第一版又自行設計連桿長度 但行走軌跡不如理想
2.3版皆採用Jansen's linkage連桿設計長度
第二版採用6隻腳的設計 行走時較四隻腳平穩
但中間腳的連桿會因軸穿越本體跟軸有干涉 後改成四足
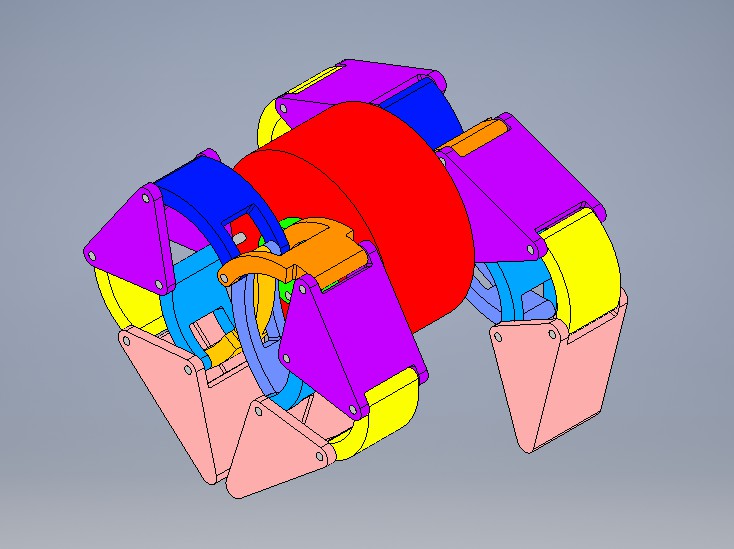
第三版改成四足設計 將原本曲柄交錯放置改成單邊放置
且行走週期從三部分改成兩部分 再以交錯隻腳設為同動
第三版實體圖▼
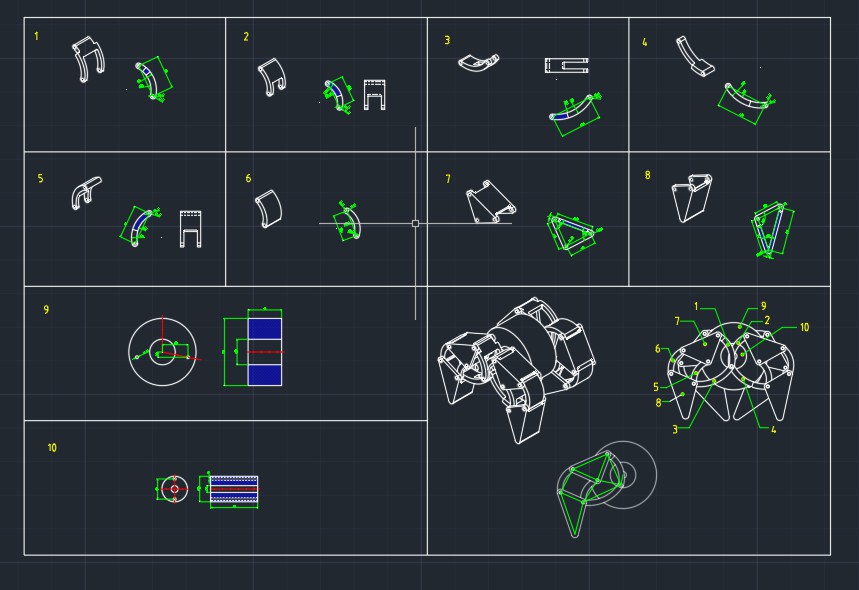
2d軟體零件圖▼
行走模擬
此次模擬常遇到的問題有
大量分件
dummy的串接
實體碰撞的支撐性
對於軟體需要一定的熟練度 非常考驗組裝邏輯和碰撞設定
stage2 <<
Previous Next >> stage2後記